Sei
![]() die Menge aller lin. Abbildungen
von
die Menge aller lin. Abbildungen
von
![]() nach
nach
![]() .
.
Sei
![]() eine Basis von
eine Basis von
![]() und
und
![]() eine Basis von
eine Basis von
![]() .
Für jede lin. Abbildung
.
Für jede lin. Abbildung
![]() lässt sich nun eine
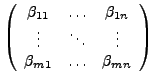
lässt sich nun eine ![]() Matrix zuordnen. Sei
Matrix zuordnen. Sei
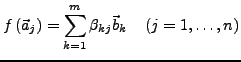
dann hat die Matrix folgende Gestalt
 |
|||
Sei
![]() ein Koordinatenvektor bezüglich der oben
gewählten Basis.
ein Koordinatenvektor bezüglich der oben
gewählten Basis.
Die Matrix der Hintereinanderausführung zweier lin. Abbildungen
![]() und
und
![]() ist
ist
![]()
Sei
![]() linear,
linear,
![]() mit
mit
![]() (
(![]() ist
injektiv). Dann muss eine Umkehrabbildung
ist
injektiv). Dann muss eine Umkehrabbildung
![]() mit
mit
![]() existieren.
existieren.
Sei
![]() dann folgt
dann folgt
![]() .
.
![]() heißt die zu
heißt die zu ![]() inverse Matrix.
inverse Matrix.
Eine Quadratische Matrix mit maximalen Rang (Rang=Spalten-/Zeilenanzahl) heißt heißt reguläre Matrix.